Beschrijving
The 10Micron GM4000 HPS II mount, now in the new M2 version, is built for observatories with an instrumentation up to a weight of 150 kg – 330 lbs (excluding counterweights). It is ideal for remotized observation sites, and its loading capacity allows for mounting instruments like 300 mm diameter refractors, 400 mm diameter Newton reflectors, 600 mm diameter Cassegrains and so on. Movements are driven by two servo brushless motors, with timing belt reduction having zero-backlash. Both axes feature a classic worm – wormwheel pairing. The wormwheels are made of bronze (B14), with a diameter of 330 mm and 430 teeth in right ascension, and a diameter of 244 mm and 315 teeth in declination. The worms are made of alloy tempered steel with a diameter of 32 mm. The axes themselves are made of alloy steel, with a diameter of 85 mm (right ascension) and 80 mm (declination), for the maximum rigidity.
The electronics is housed in an easily detachable housing (control box), mounted above the right ascension axis, in order to obtain the best accessibility of all connections. The connections of the mount and keypad secutiry lock screws. Only one cable runs from the control box to the mount. The axes feature a 60 mm diameter hole allowing for the passage of instrumentation cables. This effectively solves the problem of entangling cables and damaging instruments, especially for remote observatories. The mount is powered with low voltage, requiring a maximum power of about 100W. This makes possible using the mount even in locations with limited power available. The GM4000HPS can be controlled completely using the included hand pad, without requiring any external PC.
The keypad is built in order to maintain the maximum readability in all lighting conditions. Both the display and the ergonomic keys, allowing for the use of gloves, feature a red backlight. An heater keeps the display warm for usage below freezing temperatures. The mount can be controlled using the most common software packages by connecting it to a PC with the RS‑232 serial port or the Ethernet connection, via the 10micron ASCOM driver or the Meade compatible command protocol. Furthermore, a dedicated software (also included with the mount) can be used to create a “virtual keypad” replicating exactly the functions of the physical keypad. The RS‑232 port can also be used to control an external dome. This flexibility makes the GM4000HPS an ideal mount for observatories and remotized observing sites.
The object database contains many star catalogs and deep‑sky objects up to the 16th magnitude. Solar system objects can be tracked so that their motion is compensated with respect to the stars. You may load orbital elements of comets, asteroids and artificial satellites into the mount, so that these objects can be tracked directly.
Pointing is made accurate through the usage of a model containing up to 100 stars, which allows for the correction of the classical polar alignment and conic errors, and also of the most important flexure terms of the optical tube. In this way it is possible to obtain pointing accuracies of the order of 15 arcseconds RMS. The same model can be used in order to obtain the maximum tracking accuracy, compensating also for the atmospheric refraction (depending on the local atmospheric pressure and temperature). A series of auxiliary functions is provided to help the user for quick aligning the mount to the celestial pole. You may also save and recover the alignment data of different observing sessions. This function is very useful if you have many instruments in different setups, each one requiring different flexure corrections. Tracking through the meridian, a typical problem with german mounts, is solved allowing for tracking for up to 30° past the meridian (configurable), in both directions. In this way any object can be tracked for at least four hours.
The tracking accuracy makes autoguiding not necessary for many uses. The absolute encoders on both axes allows to obtain a typical tracking error below 1 arcsecond,
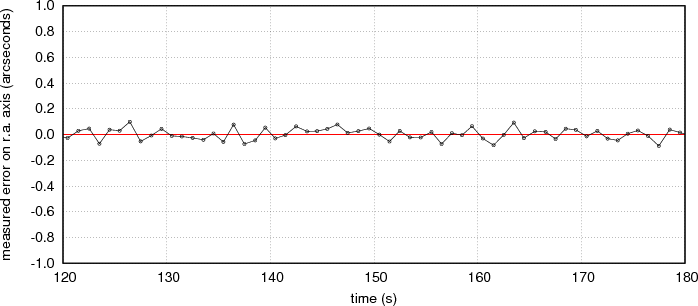
It is possible to autoguide anyway, using the ST4‑compatible port or through the serial/Ethernet connection, with a guide rate configurable from 0.1x to 1x. The guide rate can be automatically corrected for the declination of the target, so that there is no need of recalibrating the autoguide when observing at different declinations. The mount has also dedicated function for easy use in the observatory. A dedicated connector on the control box panel is used for remotized switching on and off. The instrument can be electronically balanced, without disengaging the worm from the wormwheel. The mount can be parked in different user‑defined positions. The serial RS‑232 port can be used to control directly an external dome, avoiding the need of using a dedicated external PC. Once configured with your instrument parameters, the firmware is able to make all the calculations required for positioning the dome slit in front of your optical tube, for almost all instrument configurations.
Levering Omvat:
GM4000 HPS II Mount including:
- GM 4000 HPS II Mount with built-in precision absolute encoders
- control box with onboard-intelligence (Linux-processor),V. 2
- HPS version firmware, stand alone system ( no PC required ),
- professional handcontrol unit with graphic display and temperature control – 10M5030
- cables
- counterweight shaft
- WiFi option included.
Technische specificaties:
| Type | German Equatorial Mount |
| Weight (mount) | 125 kg – 276 lbs without accessories |
| Instrument payload capacity | 150 kg – 330 lbs |
| Latitude range | 20° – 70° |
| Azimuth fine adjustment range | +/− 10° |
| Counterweight shaft | 60 mm diameter, stainless steel, weight 13 kg – 29 lbs |
| Axes | r. a. 85 mm diameter, alloy steel dec. 80 mm diameter, alloy steel |
| Bearings | Pre-loaded tapered roller bearings |
| Worm wheels | a.r. 430 teeth, 330 mm diameter, B14 bronze dec. 315 teeth, 244 mm diameter, B14 bronze |
| Worm gears | diameter 32mm, tempered alloy steel, grinded and lapped |
| Transmission system | Backlash-free system with timing belt and automatic backlash recovery |
| Motors | 2 axes servo brushless |
| Power supply | 24 V DC (48V DC as special option) |
| Power consumption | ~ 1,5 A at sidereal speed ~ 5 A at maximum speed ~ 6 A peak |
| Go-to speed | Adjustable from 2°/s to 8°/s (6°/s in a.r.) Special version 48V DC from 2°/s to 12°/s (10°/s in a.r.) |
| Pointing accuracy | < 20” with internal multiple-stars software mapping |
| Average tracking accuracy | < +/− 1″ typical for 15 minutes (< 0.7″ RMS) with internal multiple-stars software mapping and compensation of flexure and polar alignment errors |
| Security stop | +/− 30° past meridian in r.a. (software) +/− 35° past meridian in r.a. (mechanical) +/− 170° interval in dec. (software) +/− 172,5° interval in dec. (mechanical) |
| Operational temperature range (standard) | – 15° C to + 35° C + 05° F to + 95° F |
| Storage temperature range | – 40° C to + 50° C – 40° F to +122° F |
| Special operational temperature range | Optional, for very low temperature operations: contact us for more details |
| Communication ports | RS–232 port; GPS port; autoguide ST-4 protocol port; Ethernet port. |
| Database | Stars: by name, Bayer designation, Flamsteed designation, Bright Star Catalogue, SAO, HIP, HD, PPM, ADS, GCVS. Deep-sky: M, NGC, IC, PGC ,UGC limited up to mV = 16. Solar system: Sun, Moon, planets, asteroids, comets, artificial satellites. Equatorial and altazimuth coordinates. User defined objects, fast slewing positions. |
| Firmware features | User defined mount parking position, 2‑stars and 3‑stars alignment function, up to 100 alignment stars for modeling, correction of polar alignment and orthogonality errors, estimate of average pointing error, storage of multiple pointing models, sidereal, solar and lunar tracking speed adjustable on both axes, declination-based autoguide speed correction, adjustable horizon height limit, pointing and tracking past meridian,, assisted balance adjustment, manual or GPS based time and coordinates setting, dome control via RS-232, configurable atmospheric refraction, network settings, comets and asteroids filter, multi-language interface. Remote Assist via Internet connection. |
| PC control | Remote control via RS-232 or Ethernet; proprietary ASCOM driver or Meade compatible protocol; update of firmware and orbital elements of comets, asteroids and artificial satellites via RS-232 or Ethernet; virtual control panel via RS-232 or Ethernet. Wi-Fi included to control the mount via Tablet, Smartphone etc. |
LET OP:
All mounts distributed through Baader may only be powered by our power supplies or with power supplies authorized for use by us. Damage caused by usage of inproper, unauthorized power supplies or voltage inverters will lead to a chargeable repair and/or may void the warranty.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Beoordelingen
Er zijn nog geen beoordelingen.